

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
动态导航系统在口腔种植领域的发展和应用
[王跃平1  , 樊圣祈
, 樊圣祈2 , 吴轶群1, 2 ]
, 樊圣祈]
|
|


【作者简介】 王跃平, 副主任医师,硕士, Email:wangyueping309@hotmail.com
动态导航系统在口腔种植领域逐渐开始使用,系统能够术前规划种植体植入路径,术中实时可视化追踪种植钻针,避开重要解剖结构,提高手术安全性。本文将简述动态导航系统的发展,组成原理和临床应用,针对不同导航系统辅助常规种植体植入的精度进行探讨,并介绍动态导航系统辅助颧骨种植体植入术的精准度,分析导致临床误差的各种因素。
Dynamic surgical navigation system has been wildly used in implantology, the navigation surgical system provide preoperative trajectory planning. Moreover, the constant visualization of drilling trajectory during operation assist the operators by avoiding critical anatomic structures to achieve safer surgery. Our article focuses on the development and function of dynamic navigation system to evaluate the accuracy of dynamic surgical navigation system when used for regular implants and zygomatic implants placement. We aim to discuss the accuracy of different brand of dynamic surgical navigation systems for implants placement and to investigate the main reasons led the inaccurate outcome.
20世纪70年代动态导航系统随着三维影像技术的发展继而研发, 结合导航立体定位框架和头颅计算机断层扫描, 由术前规划软件及定位探针组成了最初始导航系统的架构。1980年末, 多个团队将导航系统软件优化后, 使得导航器械尖端能被系统实时定位于计算机断层扫描图像上, 有利于术中定位。在导航系统飞快的发展与成熟之下, 1992年加拿大安大略医疗团队操作了临床上第一台计算机导航辅助下完成的神经外科手术, 此无框架立体跟踪系统被称为Viewing Wand, 成功结合了术前CT诊断, 术前治疗计划和术中实时导航的应用, 成为重要的里程碑。之后5年内, 此领域逐渐扩展应用到头颈部, 脊椎, 上颌窦和关节内窥镜等手术中, 并于21世纪早期, 计算机导航系统辅助手术成为神经外科手术的标准术式之一[1]。
1988年牙科三维CT出现后, 实时导航系统才正式在口腔种植学领域开展。1993年推出了第一代SimPlant软件辅助规划术前三维影像上种植体植入的方向及位置。2000年, 第一个适用于种植学领域的动态导航系统才正式出现, 能够完善地利用术前规划软件设计出种植体植入位置, 于术中实时追踪术者器械, 将牙科钻头及患者解剖结构可视化, 辅助术中定位种植窝预备的位置, 确定种植窝预备的方向[2, 3]。然而, 最初的导航设备由于操作过程过于复杂, 导航仪器体积过于庞大等诸多缺点导致难以应用于临床治疗, 已遭淘汰。近年来经过对导航仪不断的改良, 以及口腔临床上锥形束CT(cone beam computed tomography, CBCT)的普及, 导航步骤的简化和配准时间的缩短, 众多厂家推出了适用于种植手术的导航仪和相应的软件, 能够满足临床医生的操作, 如IGI, VISIT, Robodent, Voxim, Treon等导航系统[4]。
动态导航系统原理:导航系统关键技术是患者临床图像三维可视化、配准技术及空间定位技术等。患者术区任何一点都能以X-Y-Z坐标表示, 同时在计算机显示器的三维图像上以对应的X’ -Y’ -Z’ 坐标来表示。术前将带有放射阻射标记的三维影像导入计算机内, 供临床医生进行术前方案设计、准备等。术中, 通过匹配术区的标记点和工作站三维影像上的标记点, 可将术中手术空间和工作站图像空间相结合, 此过程称为配准[2]。临床上配准方式分为两类, 分别为基于标记点的配准(Marker-based)和无标记点的配准(Marker-free)。基于标记点的配准是利用 
导航系统包括硬件, 软件和导航工具。
硬件包括数据处理计算机、监控屏幕、键盘、鼠标。所有配件整合于定制的手术工作站以利术者操作。
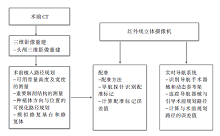
通过导航设计软件术前将CBCT等影像数据处理及导入, 辅助术前诊断及设计, 于重建的三维影像上选定最佳种植体植入位置及方向, 避免植入路径触及和损伤重要解剖结构, 制定最优化的手术方案。术中利用导航系统实现手术区域与三维影像空间的实时配准与追踪, 通过实时可视化引导医生完成精确定位与操作, 从而提高手术的精确性和安全性。借助动态导航系统, 术者可以实时观察手术器械的位置, 同时进行手术操作, 实现了实时定位、调整、控制钻孔路径及角度、设置报警点等目标, 从而可以精准按照术前手术规划植入单枚或多枚种植体, 避免伤及重要组织结构, 缩短了手术时间, 降低术中盲视下手术可能造成的创伤。
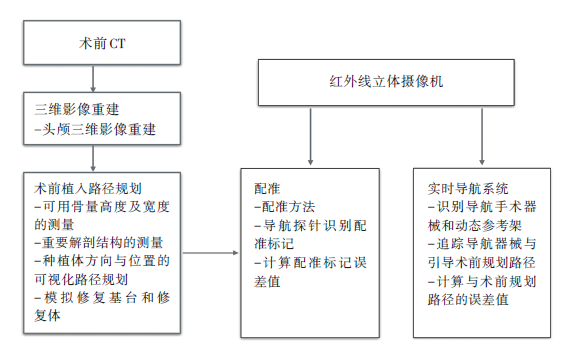 | 图 1 动态导航工作流程图Figure 1 Working frame of navigation system in implant dentistry |
种植机头和患者参考架上安装红外线装置或光学反射球。导航时根据追踪工具上发出的LED信号或反射的红外线追踪手术工具的实时位置。红外线照相机接收患者跟踪装置、指示器及钻头跟踪装置上的编码信号, 将信号传回计算机。需要注意的是, 红外线照相机和手术工具两者之间不能有障碍物阻碍, 且需保持在一定范围内追踪。
光学追踪系统为目前导航系统中较常用的定位方法, 其中又可以分为主动追踪和被动追踪两种不同的方式 [6]。目前, 口腔种植领域中, 大多数厂家推出的光学追踪系统都是以被动追踪为主, 原理为动态参考架将红外线发光二级管发出的信号反射回红外线立体摄像机后再负责将颌骨位置信号传给计算机。在整个配准和手术过程中, 动态参考架必须坚强稳固地固定于三维导航模板上。以动态导航系统辅助单个牙缺失的种植体植入术为例, 配准装置术前固定在邻近缺牙区或对侧同名牙上(图2a), 导航参考架与配准装置连接并延伸至口外, 红外线立体摄像机需要设立在高于患者头部的区域, 才能有效追踪信号。对于无牙
目前, 国内外已有多个厂家针对口腔种植领域研发出计算机导航系统及设备。近期研究[4]比较多个不同导航系统间的误差值, 将动态导航系统辅助下植入的1041枚常规种植体及种植体预备窝进行分析。作者计算种植体或钻头植入前后的起点和止点水平误差, 误差结果显示Treon系统(Medtronic navigation, USA)为0.90 mm和0.60 mm, IGI系统(Image navigation, USA)为0.39 mm和0.50 mm, Robodent系统(Robodent, Germany)为0.35 mm和0.47 mm, Visit系统(University of Vienna, Austria)为0.72 mm和0.99 mm 。实时导航系统辅助下能达到较小的误差, 因此其不仅被推荐适用于骨量充足的不翻瓣微创种植手术, 对于剩余骨量不足和临近重要解剖结构, 难度较高的种植体植入术也符合其适应症。
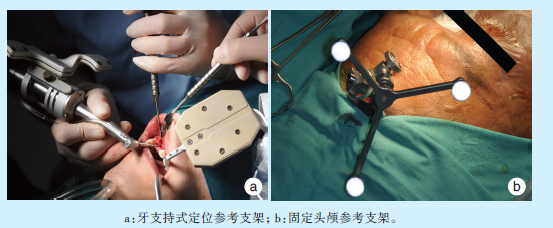 | 图 2 参考支架Figure 2 Dynamic reference frame |
以往患者带着放射导板拍摄全景片和根尖片来模拟缺牙区修复体的位置和方向, 然而这种影像技术无法提供完整的三维结构。因此, 传统的手术导板只用来引导钻头定位种植体植入起点和角度, 无法显示出骨内的重要解剖结构, 继而无法提供准确的三维手术引导[7, 8]。为了克服上述困难, 各国学者一直致力于开发修复引导的精确种植体植入术。CT、种植规划软件和CAD/CAM无疑是此领域发展过程中的重要成果, 推动了数字化影像辅助种植体植入, 多种不同方法已经应用于临床实践。患者佩戴放射导板拍摄的三维影像经计算机制作成手术导板, CAD/CAM技术生成光固化导板、3D打印导板和动态导航辅助种植体植入术等。对于单牙或少数牙缺失的种植体植入术, 传统手术方法已可以达到良好预期结果[9, 10], 甚至骨量严重吸收的缺牙区, 能通过不同骨增量术来满足种植体植入术所需的骨量。但对于美学要求较高的前牙区, 种植体植入的位置、深度、方向稍有偏差都将会影响术后修复的效果。因此植入位点的设计和精确度显得格外重要。
对于单牙或多个牙缺失的种植体植入术, 于术前设计软件中将修复体拟合至缺牙区, 确定上下颌咬合关系, 规划种植体基台于修复体咬合面最优的穿出位点, 进而达到以修复为导向的种植体植入术。动态导航手术系统辅助常规种植体植入已被广泛研究证实能够达到临床可接受的误差, 相较于自由手(free-hand)操作, 导航系统的显著优势在于能将术前设计的种植体植入位置和方向, 高精准复制于患者口内, 并且通过术后拍摄CBCT与术前规划路径两者导入导航系统软件拟合, 即可明确分析出种植体植入的起点、止点和角度误差。临床研究指出[11]通过动态导航手术系统辅助常规种植体植入于离体头颅的起点误差、止点误差和角度误差分别是0.58 mm、 0.79 mm和3.55° 。而临床上的误差结果略高于离体头颅, 其起点误差、止点误差和角度误差分别是1.00 mm、 1.30 mm和6.40° [12]。理论上来分析, 离体头颅和3D打印头颅因没有受限于临床术中患者体位、开口度、唾液血液及手术器械和导航系统操作等影响, 故其研究精准性应高于临床研究。
数字化手术导板已广泛应用于引导常规植体的植入, 而且也具有良好的精确性。数字化手术导板于术区的稳定程度对手术精准度有较大的影响, 单牙缺失或多个牙缺失的数字化手术导板可利用余留牙作为牙支持式来固位, 以达到良好的固位效果。Jung等学者[4]将动态导航系统与数字化手术导板两者结果比较显示, 两者间无显著性差异, 因此数字化手术导板与动态导航系统均可作为引导常规种植体植入并有效提高精确性的辅助工具。
上颌牙列缺失伴剩余骨量严重不足患者的种植修复是口腔种植领域亟待解决的难题之一。对于剩余骨量充足的上颌牙列缺失患者而言, 种植方案多采用6至10枚常规种植体支持的分段式或一段式固定修复, 若患者剩余骨量不足时则须采取上颌窦侧壁开窗提升术, 引导骨组织再生技术, 块状骨移植或牙槽骨牵张成骨等骨增量技术, 获得足够的可用骨量后再进行种植体的植入。然而当上颌剩余骨量严重不足或存在上颌骨缺损时, 上述骨增量技术的实施则难以获得可预期的成骨效果, 并且会大幅延长治疗周期、增加术中创伤及患者负担。1998年Branemark教授首先提出将较长种植体植入颧骨以解决上颌骨量不足的种植技术, 通过双侧各植入一枚颧骨种植体并结合前牙区2至4枚常规种植体, 以一段式固定修复体重建上颌牙列[13]。颧骨致密的骨质和充足的骨量, 使得种植体在植入后得到足够的初期稳定性, 为即刻修复提供所需的必要条件[14]。无牙
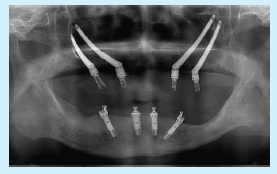
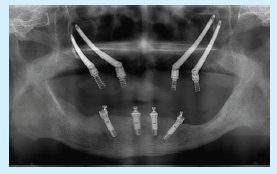 | 图3 双颧种植体植入术后全景片Figure 3 Radiographic of post-surgery of quad zygomatic implants placement |
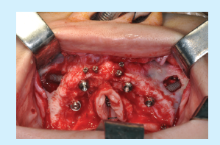
前牙区剩余骨量严重不足而无法植入常规种植体的患者, 不符合颧骨种植的经典术式适应症。Bothur[16]等学者提出单侧颧骨植入多枚种植体的可行性, 并分别于双侧颧骨各植入2枚和3枚种植体, 继而提出双侧颧骨各植入2枚颧骨种植体的改良术式(zygomatic quad approach)[17, 18, 19, 20], 又称之为双颧种植体植入术(图3)。该改良术式较经典术式的适应症更为广泛, 能获得更加优化的植体受力分布。但研究指出[21], 单侧颧骨植入2枚种植体时, 更容易出现种植体位置过近, 伤及眼球、眶下神经血管等重要解剖结构, 引起严重的手术并发症。 为了提高颧种植体植入手术的精准性和安全性, 目前临床上有学者使用计算机辅助手术导航技术来帮助完成手术(图4 ~ 5)。
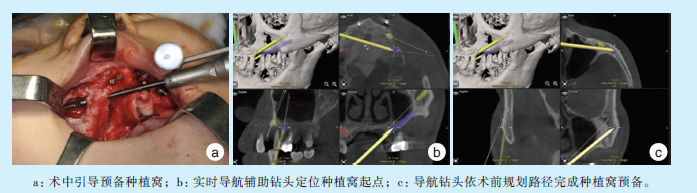 | 图4 动态手术导航系统引导下进行种植窝的预备Figure 4 Drilling procedure assisted by navigation system |
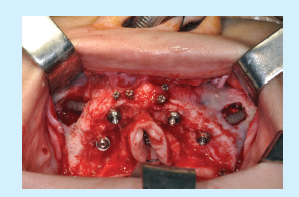 | 图5 动态手术导航系统下植入颧骨种植体Figure 5 Placement of zygomatic implants with assistant of navigation system |
Hung等[22]临床研究指出, 通过计算机动态导航系统辅助的颧种植体手术, 将导航软件术前规划路径和术后影像进行融合, 所测得52枚颧种植体的起点误差、止点误差和角度误差分别是1.24 mm、 1.84 mm和2.12° 。与以往于离体头颅[23]及3D打印头颅[2]上研究动态导航系统辅助的颧种植体植入精确性的实验结果相近。数字化手术导板在导向前需将固位钉植入于上颌以固定导板, 但对于此类上颌无牙
计算机导航系统辅助颧骨种植体植入术已获得可接受的误差范围。若想将误差控制在最小范围, 必须先找出导致误差的因素。下面列举出主要误差来源[26]:光学跟踪系统的尺寸大小和离追踪器械的距离; 动态参考架的位置、角度、稳定度; 探针测定配准点的位置、角度、松动度; CBCT的层厚、图像导入及重建过程是否变形; 配准方式与配准过程导致的定位配准标志误差(FLE), 配准标志配准误差(FRE)和目标配准误差(TRE); 导航设备的精准性; 术者的临床操作是否熟练。对于刚开始接触导航系统的“ 新手” , 可能会因为较复杂的操作流程导致难以上手, 尤其术中需将手术视野从患者口内转移至实时三维影像显示器, 增加了操作上的不适应。近期研究[27]关于导航系统辅助种植体植入术的学习曲线, 证实经过临床20次实时导航系统辅助种植体植入术后能大幅提升种植体精准度, 将常规种植体的止点误差降低至0.96 mm及角度误差降至3.63° 。也有部分教学医院利用计算机导航辅助系统培训种植专科医生在离体头颅外的操作, 利用设计软件预规划种植体植入入径, 在离体头颅或3D打印头颅上预备种植体种植窝, 习惯临床操作手感, 实时掌握术区三维空间位置与判别邻近重要解剖组织, 增加临床实战经验。
目前, 计算机动态导航系统在种植外科领域中的应用已成为讨论热点之一, 但因为其设备较昂贵, 故难以全面推广。导航术前规划软件, 手术配准及术中设备的操作都具有较高的技术敏感性, 需要经验丰富的技术人员指导才能发挥其功能将植入的种植体误差降至最小。对于计算机动态导航系统辅助下颌无牙
动态导航系统在口腔种植外科领域中的应用越来越广。对于常规种植体植入术的患者, 动态导航系统和数字化手术导板均有良好的精准度, 两者皆能达到满意的效果, 动态导航能够使医生实时把握手术。对于上颌牙列缺失伴剩余骨量严重不足的患者, 动态导航系统在复杂患者种植中的引导作用具有显著优势, 如引导颧骨种植体的植入具有较高的精准性, 减少术中并发症。如何获得精度更高的结果, 使误差降到最小有待于进一步研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|